Исследование профессора Родериха Гросса из Дармштадтского технического университета (TU) показало, что роботы могут эффективно передвигаться в толпе, чередуя независимое и совместное поведение. Это позволяет им минимально беспокоить людей вокруг.

По словам профессора Гросса, роботы все чаще будут работать в человеческих средах — на фабриках, в больницах и в зонах бедствия. Однако задача безопасной и эффективной навигации в плотной толпе до сих пор не решена полностью.
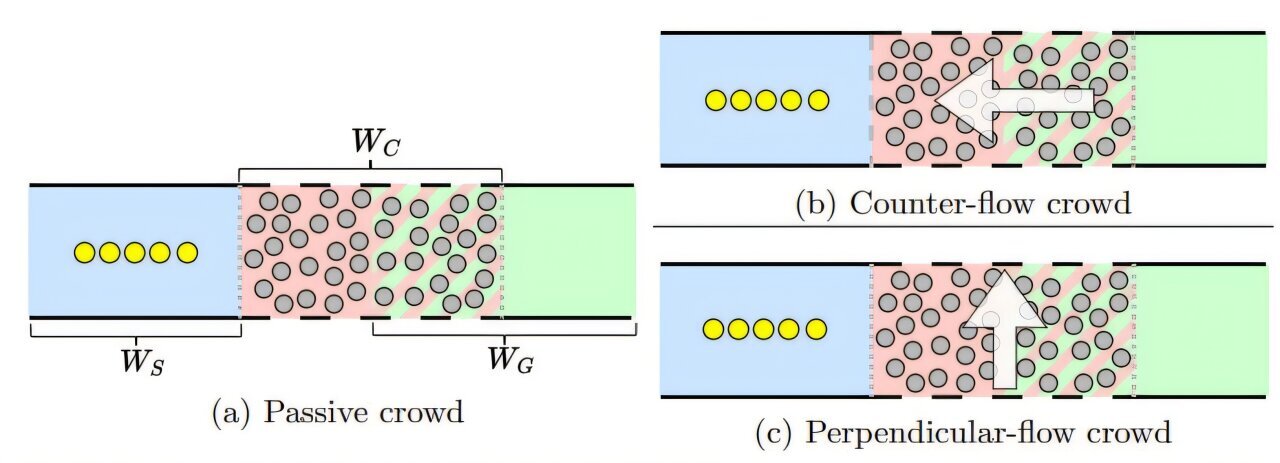
В ходе исследований ученые из TU и Университета Шеффилда смоделировали группы роботов, которые сталкивались с различными типами толп. Они тестировали три стратегии поведения: независимую, при которой каждый робот действует самостоятельно. Кооперативную, где роботы образуют линию и следуют за лидером и адаптивную, которая позволяет роботам переключаться между двумя первыми стратегиями в зависимости от ситуации.
Результаты симуляций показали, что кооперативная стратегия менее всего беспокоит толпу и эффективнее работает в «густой» толпе. Независимая стратегия была более успешной, когда людей было немного. Адаптивная стратегия объединила преимущества обеих и показала отличные результаты в разных сценариях.
Ученые планируют разработать формальные методы обеспечения безопасности и провести испытания в реальных условиях. Это позволит роботам определять позиции людей в реальном времени и безопасно взаимодействовать с толпой, даже когда поведение отдельных людей отличается.
 © arXiv
© arXiv